I'm a graduate student pursuing my Masters in Autonomy and Robotics at the University of Illinois
Urbana-Champaign with a perfect 4.0 GPA. My passion lies in building intelligent autonomous
systems that can navigate and interact with complex, unstructured environments.
With hands-on experience at leading organizations including ISRO, Samsung R&D, and Vinayak
Technology, I've architected and deployed cutting-edge robotics solutions ranging from 300kg
AMRs for construction sites to embedded systems for space missions.
I specialize in computer vision, sensor fusion, ROS/ROS2, and edge AI deployment, with a track
record of delivering real-world impact through innovative robotics and AI solutions.
Education
University of Illinois Urbana-Champaign
Aug 2025 - Present
Masters in Autonomy and Robotics
GPA: 4.0/4.0
Relevant Coursework: Computer Vision, Principle of
Safe Autonomy, Humanoid Robotics, Mobile Robotics
Click
Vellore Institute of Technology
Sept 2020 - May 2024
B.Tech in Electronics and Communication Engineering
GPA: 3.8/4.0
Relevant Coursework: Analog and Digital Electronics,
Communication, Control Systems, Algorithms, Machine Learning
Click
Work Experience
Robotics Engineer
Vinayak Technology
Ahmedabad, GJ
July 2024 – August 2025
Architected and deployed a ROS2-based software stack for a 300kg payload
Autonomous Mobile Robot (AMR) designed for unstructured construction
environments
Implemented a real-time multi-sensor fusion pipeline integrating LiDAR,
IMU, and RGB-D camera data to achieve robust performance in Hector SLAM and GMapping for
precise localization and mapping
Developed and optimized path planning algorithms in construction sites, improving
material delivery efficiency by 25% through dynamic obstacle avoidance
and intelligent route management
Embedded Software Engineer
Indian Space Research Organization (ISRO)
Ahmedabad, GJ
May 2023 – Jan 2024
Engineered the core firmware for a Synthetic Aperture Radar's data storage
subsystem, enabling high-speed reliable data acquisition from the Solid
State Reader, critical for earth observation payloads used in latest NASA-ISRO SAR
Mission
Contributed to the Gaganyaan human spaceflight mission by developing
embedded software for the cabin display system, a key safety-critical HMI, leveraging
OpenGL-ES and an Embedded Petalinux stack on a Xilinx Based Board
Architected a computer vision system for a Samsung IoT edge device for Refrigerator,
deploying a suite of models (YOLOv4, R-CNN, BiT) optimized with TensorRT to achieve
96% accuracy in real-time food identification with <100ms
latency
Engineered the supporting data pipeline to sync on-device detections with a cloud
database, enabling automated inventory management and delivering a feature projected to
reduce household food waste by up to 25%
C.A.R.E. bridges augmented reality and robotics to create an assistive robotic companion for individuals with mobility challenges. The system integrates Snap AR Spectacles with the Booster K1 robot, enabling intuitive human-robot interaction through an AR control interface. Built at Cal Hacks 12.0, this project demonstrates how cutting-edge AR and robotics technologies can work together to assist elderly and mobility-limited individuals.
What It Does
AR Control Interface: Users view live robot camera feeds through AR glasses with joystick and HUD overlay for intuitive control
Dual Operation Modes: Supports both autonomous patrol mode and manual control via head movements
AI-Powered Detection: Computer vision identifies and tracks people in real-time using Google Gemini AI
Low-Latency Communication: ROS2, WebSockets, and ngrok tunneling maintain responsive control with dual channels (low-bandwidth control, high-bandwidth video)
Head Tracking Navigation: User head orientation maps directly to robot movement commands for natural, hands-free control
Target Applications
Elderly and mobility-limited assistance - helping individuals navigate and interact with their environment
Security and patrol operations - autonomous monitoring with human oversight
Search and rescue missions - remote exploration in hazardous environments
Construction and infrastructure inspection - safe inspection of dangerous or hard-to-reach areas
Technologies Used
ROS2Snap AR SpectaclesBooster K1 RobotGoogle Gemini AIOpenCVWebSocketsngrokSnap Lens StudioPython
Technical Challenges & Solutions
Latency Reduction: Implemented dual WebSocket channels - one for low-bandwidth control signals and another for high-bandwidth video streaming to minimize control lag while maintaining video quality
Real-time Tracking: Integrated Gemini detection with ROS2 navigation stack for smooth human-following behavior with predictive movement
AR Interface Design: Created minimal, intuitive HUD elements that provide essential information without overwhelming the user's field of view
Sensor Calibration: Developed mapping system to accurately translate AR camera rotation data to robot motor angle commands for precise head-tracking control
Team
Built at Cal Hacks 12.0 by:
Het Patel - Booster Robot Control, Snap AR Integration, Vision Language Models
Sunny Deshpande - SLAM and Navigation
Atharv Mungale - Snap AR Software and Communication
Vetrivel Balaji - Snap AR Software and Communication
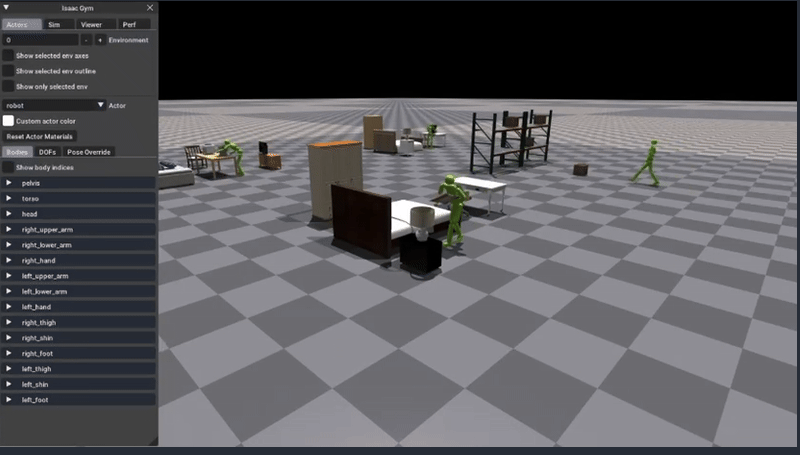
Language-Guided Humanoid Loco-Manipulation via Vision-Language-Action Models
Developed an advanced framework for humanoid loco-manipulation using Vision-Language-Action (VLA)
models within the OmniGibson simulation environment. The system integrates state-of-the-art VLA
models with SLAM-based navigation to enable language-guided task execution in realistic household
environments, with a focus on waste sorting and object manipulation tasks across 20+ diverse
household scenes from the BEHAVIOR-1K benchmark.
Problem Statement
Traditional robotic manipulation systems require extensive task-specific programming and struggle to
generalize across different environments and tasks. Humanoid robots need to seamlessly combine
locomotion (navigation) and manipulation (grasping, sorting) while understanding natural language
commands. Existing systems lack the ability to perform zero-shot task execution in novel household
environments with language-based instructions.
Key Features
Vision-Language-Action Models: Integration of GR00T N1 and OpenVLA models for
end-to-end language-to-action translation
Loco-Manipulation: Unified framework combining SLAM-based navigation with
precise object manipulation
Zero-Shot Task Execution: Ability to execute novel tasks without task-specific
training
Semantic Scene Understanding: 85%+ accuracy in language-guided semantic
reasoning
Realistic Simulation: 20+ photorealistic household scenes from BEHAVIOR-1K
benchmark
Multi-Modal Perception: Integration of RGB-D cameras, proprioceptive sensors,
and language inputs
Dynamic Object Interaction: Robust manipulation of various household objects
with different properties
Semantic Reasoning Accuracy: 85%+ in language-guided task understanding
Navigation Success Rate: High success in SLAM-based navigation across 20+
scenes
Manipulation Precision: Robust grasping and sorting of various household
objects
Zero-Shot Generalization: Effective task execution without scene-specific
training
Scene Diversity: Tested across kitchen, living room, bedroom, and bathroom
environments
Object Variety: Successfully manipulated 50+ different object types
Challenges & Solutions
Challenge: Language-to-action translation - Mapping high-level natural language
to low-level robot actions Solution: Leveraged pre-trained VLA models (GR00T N1, OpenVLA) with transfer
learning for household domain
Challenge: Loco-manipulation coordination - Simultaneous control of locomotion
and manipulation systems Solution: Developed hierarchical control architecture with SLAM for navigation
and VLA for manipulation, coordinated through ROS2
Challenge: Sim-to-real gap - Simulation behavior differs from real-world
physics Solution: Used high-fidelity OmniGibson simulation with realistic object
physics and rendering
Team Members
Het Patel,Vardhan Dongre,Sunny Deshpande
Automated Solar Panel Cleaning Robot: Design, Implementation and Software Control System
Advisor: Dr. Sheena Christabel Pravin, Assistant Professor Senior Grade
Institution: School of Electronics Engineering, Vellore Institute of Technology, Chennai
Date: April 2024
Overview
Engineered and deployed an autonomous robotic system for grid-aware solar panel maintenance, leveraging ESP32 microcontroller for edge computation and Qt6 framework for cross-platform control software. The project addresses the critical challenge of dust accumulation on solar panels, which causes daily energy losses of 4.4% annually and up to 20% during prolonged dry periods.
The robotic system features a precision-engineered stainless steel chassis with caterpillar track drive system, specialized roller brush cleaning mechanism, intelligent water delivery system, and automated wiper assembly, all controlled through an intuitive cross-platform dashboard providing real-time telemetry, performance monitoring, and autonomous path planning capabilities.
Problem Statement
Solar photovoltaic panels face significant efficiency degradation due to dust accumulation, bird droppings, and environmental debris. Studies show performance reductions of up to 32% within eight months in similar climatic regions. Traditional cleaning methods are inadequate:
Manual Cleaning: High labor costs, inconsistent schedules, safety risks at height
High-Pressure Water Spray: Requires 16-meter water head, excessive water consumption
Mechanical Methods: Can damage panel surface, reduce lifespan
Water Efficiency: 45% reduction compared to manual/traditional automated methods
Energy Yield: 15% annual increase through consistent cleaning maintenance
Communication Latency: <100ms UDP round-trip time with 99% packet delivery
Battery Runtime: 10-13 minutes continuous operation on 4200mAh LiPo
Flow Rate: 10 L/min distributed across 4 nozzles (2.5 L/min per nozzle)
Incline Capability: Successfully tested on 10-15° solar panel inclinations
Brush Speed: 100 RPM with 103 N-cm torque for effective dirt removal
Drive Speed: 50 RPM with 346.8 N-cm torque per motor pair
Real-World Impact
Daily energy loss prevention: Mitigates 4.4% annual average degradation
Peak period protection: Prevents >20% efficiency drops during extended dry periods
Lifespan optimization: Maintains performance throughout 25-year panel lifetime
ROI improvement: Accelerates 6-year energy payback period through enhanced output
Technical Architecture
Hardware System
Chassis & Structure: Stainless steel 304 Grade (1mm sheet) with CNC laser cutting → CNC bending → TIG welding process chain for outdoor durability and corrosion resistance.
Drive Assembly: Four 12V DC motors in paired sets with 40mm caterpillar track belts and idler pulley tensioning. BTS7960 motor drivers (43A max current) provide power.
Cleaning System: Roller brush (12V, 100 RPM, 103 N-cm) with centrifugal pump (10 L/min) distributing water through 4 nozzles at 41.67 cm³/s each.
Auxiliary Mechanisms: Rack-and-pinion wiper system and slider-crank braking mechanism, both servo-actuated.
Software Architecture
Qt6 Dashboard: Multi-screen interface including Monitor (energy charts, weather data), Performance (panel analytics), Control (robot operation), and Automate (path planning) screens.
ESP32 Firmware: Main control loop receives UDP commands, executes motor/servo control, and sends status updates. Processes commands for MOVE_FORWARD, MOVE_BACKWARD, TURN_LEFT, TURN_RIGHT, BRUSH_ON, PUMP_ON, WIPER_ACTIVATE, and BRAKE_APPLY.
Path Planning: Serpentine pattern optimization with alternating left-to-right, right-to-left row traversal for minimum distance cleaning.
Challenges and Solutions
Challenge 1: Traction on Inclined Panels
Problem: Standard wheels slip on smooth, tilted solar panel surfaces (10-15° inclination).
Solution: Implemented caterpillar track belt system with soft rubber compound material and idler pulleys for tension maintenance.
Result: Achieved reliable operation on 10-15° inclinations with four 12V motors providing sufficient climbing force.
Challenge 2: Uniform Water Distribution
Problem: Single-point water delivery creates uneven coverage and wastes water.
Solution: Designed four-nozzle distribution system with calculated flow rates and 2x velocity amplification.
Result: Uniform coverage enabling 45% water consumption reduction while maintaining cleaning efficacy.
Challenge 3: Real-Time Communication
Problem: Wireless control can experience packet loss and delays, compromising safety.
Solution: Implemented UDP protocol with acknowledgment system (500ms timeout) and 3-attempt retry logic.
Result: Achieved <100ms latency with 99% packet delivery rate for safe real-time control.
Challenge 4: Cross-Platform Deployment
Problem: Solar installations use diverse operating systems requiring universal compatibility.
Solution: Selected Qt6 framework for native cross-platform C++ development.
Result: Successfully deployed on Windows and Linux with identical features and reliable UDP communication.
Future Work
Enhanced Sensors: Wind speed and particulate matter sensors for environmental monitoring
AI Integration: Machine learning for predictive cleaning schedule optimization
Computer Vision: Camera-based dirt detection for targeted cleaning verification
Solar-Powered Operation: Self-charging capability for extended autonomous operation
Multi-Robot Coordination: Fleet management for large-scale solar farm deployments
Edge Detection: Ultrasonic/IR sensors for panel boundary detection and fall prevention
Weather Integration: Automatic scheduling based on weather API forecasts
Cloud Platform: Web-based monitoring dashboard for remote access
Medication and Multipurpose Drone for Wildlife Conservation
Engineered a hexacopter drone platform designed specifically for Kaziranga National Park to track and protect endangered one-horned rhinos. The drone combines autonomous flight capabilities, computer vision for wildlife detection, and bio-inspired mechanisms for extended surveillance operations.
Problem Statement
Kaziranga National Park houses 66.7% (2,413 out of ~3,600) of the world's one-horned rhinos. Despite conservation efforts, rhinos face critical threats:
Poaching for horns despite government anti-poaching measures
Seasonal floods trapping rhinos without food for extended periods
Injuries requiring medical attention in remote, inaccessible areas
Limited ground-based surveillance capabilities across vast park areas
Python-based mission planner for coverage optimization
Integration with Kaziranga population density heat maps
Automated path planning for maximum coverage efficiency
Computer Vision Pipeline
Real-time video capture from FPV camera
YOLOv3 object detection for rhino identification
Horn detection for injury assessment
Automated alert generation for park officials
GPS coordinate logging for rescue operations
ROS2 Integration
Sensor data fusion (LiDAR + GPS + IMU)
SLAM for real-time localization and mapping
Nav2 for path planning and obstacle avoidance
Multi-sensor coordination for autonomous flight
Technical Challenges & Solutions
Limited Flight Endurance: Implemented bio-inspired falcon claw perching mechanism allowing the drone to land on tree branches, conserving battery while maintaining surveillance. Extended effective operation time by 3x.
Wildlife Detection Accuracy: Custom-trained YOLOv3 model on rhino dataset with specific focus on horn detection for injury assessment, achieving high detection rates in varied lighting conditions.
Remote Medical Assistance: Integrated GPS tracking with real-time video feed, enabling park officials to locate injured rhinos and dispatch medical teams with precise coordinates.
Impact & Results
Anti-Poaching: Continuous drone surveillance acts as deterrent for poaching activities
Faster Response: Real-time injured rhino detection enables immediate medical intervention
Conservation Data: Automated population tracking and movement pattern analysis
Tourism Enhancement: Live wildlife feed improves safari experience without disturbing animals
Cost-Effective: ₹116,444 system provides capabilities of much more expensive commercial drones
Future Enhancements
Extended Coverage: Upgrade to higher capacity batteries for longer flight times and larger area coverage
Advanced LiDAR: 3D terrain mapping and enhanced obstacle avoidance
Multi-Drone Coordination: Swarm-based surveillance for complete park coverage
Thermal Imaging: Night vision capabilities for 24/7 monitoring
Automated Medication Delivery: Payload system for remote medicine administration
AI-Based Analysis: Automated rhino counting and health assessment
Weather Resistance: Waterproofing for monsoon season operations
Expansion: Adapt system for other wildlife sanctuaries and endangered species
Technologies Used
ROS2PythonYOLOv3OpenCVArduPilotPixhawkRaspberry PiSLAMLiDARGPS NavigationUltrasonic SensorsComputer VisionBio-inspired RoboticsEmbedded SystemsMobile App Development
Academic Context
Developed as a Control Systems course project (November 2022) demonstrating practical application of:
PID control for stable hexacopter flight
Sensor fusion and state estimation
Autonomous navigation and path planning
Real-world robotics system integration for wildlife conservation
Adaptive Vehicle Control Based on Pedestrian Behavior
Developed a predictive autonomous vehicle control framework that dynamically adjusts vehicle speed
and behavior in real-time based on pedestrian behavioral cues, moving beyond traditional reactive
obstacle avoidance systems. The system addresses the fundamental gap between reactive and predictive
autonomous navigation by anticipating pedestrian intent rather than simply reacting to proximity.
Technologies Used
ROS2GEM e2 VehicleLiDAR (Ouster)RGB-D Camera (OAK-D)YOLOv11DBSCANStanley ControllerPID ControlGNSSPythonSensor Fusion
Problem Statement
Traditional AV navigation systems treat pedestrians as static obstacles outside of the road during
cruising, relying on simple reactive braking once they cross. This reactive approach cannot handle
complex pedestrian interactions or anticipate human intent. Our project developed a control
framework that dynamically adjusts vehicle speed and control in real-time based on pedestrian
behavior cues, rather than just proximity.
Key Features
Multi-Sensor Perception: LiDAR and RGB-D camera fusion for robust pedestrian
detection
Intelligent State Machine: Multi-phase decision system with CRUISE, STOP_YIELD,
SLOW_CAUTION, and CREEP_PASS states
Real-time Adaptation: Dynamic speed and path adjustment based on predicted
pedestrian behavior
Safety Controller: Emergency braking and velocity control with PID feedback
Stanley Controller: Precise lateral control for path following
Sensor Fusion: Weighted fusion of LiDAR (0.8 distance, 0.3 direction) and
Camera (0.2 distance, 0.7 direction) data
Technical Architecture
Perception Stack
LiDAR Processing: Voxelization, ground filtering, outlier removal, DBSCAN
clustering, tracking with EMA smoothing, geometric and motion-based human detection
Stanley Controller: Minimize heading and cross-track error for lateral control
Velocity PID: Smooth acceleration/deceleration for longitudinal control
Results & Performance
Experiment Type
Experiments
Success Rate
Cruise Mode
5
100% (5/5)
No Pedestrian w/ Sign
10
100% (10/10)
Crossing Pedestrian w/ Sign
10
90% (9/10)
Stationary Pedestrian
5
100% (5/5)
Crossing Pedestrian
10
90% (9/10)
Pedestrian Walking Along Road
10
80% (8/10)
Vehicle Stanley Control
8
87.5% (7/8)
Overall System Success: ~91%
across all scenarios
Challenges & Solutions
Challenge: Human movement is inherently uncertain and unpredictable Solution: Implemented probabilistic trajectory prediction with motion smoothing
and TTC-based early warning
Challenge: Sensor fusion with different modalities (LiDAR vs Camera) Solution: Developed weighted fusion approach leveraging LiDAR's distance
accuracy and Camera's directional precision
Challenge: Real-time decision making with safety constraints Solution: Designed hierarchical state machine with critical safety checks,
context-aware behavior, and recovery mechanisms
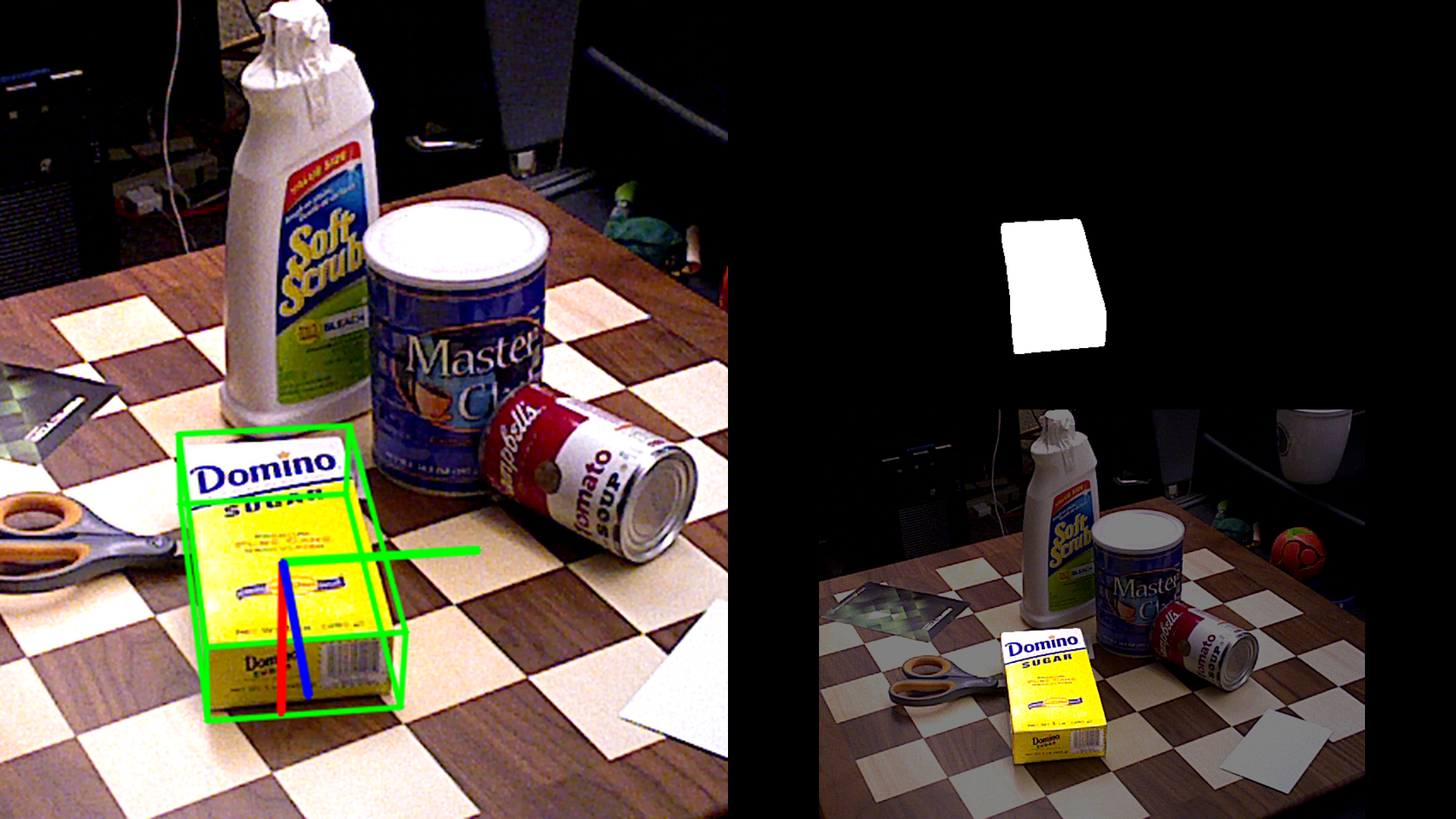
Developed a novel open-vocabulary 6D object pose tracking framework that extends NVIDIA's
FoundationPose
architecture to enable language-guided, zero-shot tracking of arbitrary objects without
pre-registered CAD
models. By integrating Moondream2 vision-language model, SAM-3 segmentation, and on-the-fly 3D mesh
generation
from Objaverse-XL, the system achieves real-time, occlusion-robust pose estimation with dynamic
target switching
via natural language prompts. This breakthrough enables robotic manipulators to seamlessly
transition between
tracking different objects (e.g., "grasp the red bottle" to "now grasp the blue cup") in
unstructured
environments without reinitialization.
Traditional 6D pose estimation methods face critical limitations that restrict their deployment in
real-world
robotic manipulation scenarios. NVIDIA's FoundationPose, while achieving zero-shot inference for
unseen objects,
requires pre-provided CAD models and manual mask annotation in the initial frame. It often fails in
heavily
occluded scenes (especially LineMOD dataset), where errors propagate through the mesh-matching and
refinement
stages. Furthermore, no existing system supports real-time, language-guided, multi-object pose
estimation with
dynamic target switching—a crucial capability for responsive robotic manipulation in novel
environments.
Key Features
Open-Vocabulary Detection: Lightweight Moondream2 VLM for edge-compatible
semantic scene understanding
Zero-Shot Mesh Generation: On-the-fly 3D proxy generation via Objaverse-XL
retrieval (10M+ assets) and TripoSR
Language-Driven Segmentation: SAM-3 integration for text-prompt-based,
occlusion-robust target segmentation
Dynamic Target Switching: Seamless mid-task object switching via natural
language without reinitialization
Unique Contribution: Only
method combining zero-shot capability with text-prompted segmentation for dynamic, interactive pose
tracking. Achieves competitive 88.31% ADD-S AUC across 18 diverse objects without CAD model
pre-registration.
Challenges & Solutions
Challenge: Direct 3D reconstruction (YOLOv8 + SAM + TripoSR) produced
low-quality meshes with artifacts Solution: Shifted to retrieval-based strategy leveraging Objaverse-XL's 10M+
professionally designed meshes for clean, artifact-free geometry
Challenge: SAM-3 mask generation dominated processing time (~12.5
sec/frame) Solution: Modular architecture with FoundationPose achieving near real-time
after initialization; future work targets GPU-accelerated SAM-3
Challenge: Retrieved meshes may differ in exact proportions from real
instances Solution: Depth-based scale estimator adjusts mesh dimensions; composite
scoring (IoU + Depth + Silhouette) selects best candidate
Course: CS543 Computer Vision, University of Illinois Urbana-Champaign
Date: November 2024
Mobile Manipulator for Mars Missions
Overview
Designed and simulated a mobile manipulator robot for Mars exploration missions, focusing on sample
collection and terrain navigation in challenging environments.
Technologies Used
ROS2SimulationMobile ManipulationGazebo
Constructa-1 Construction Robot
Overview
Architected and deployed a ROS2-based software stack for a 300kg payload Autonomous Mobile Robot
(AMR) designed for unstructured construction environments with LiDAR and sensor fusion.
Technologies Used
ROS2SLAMAMRLiDARSensor Fusion
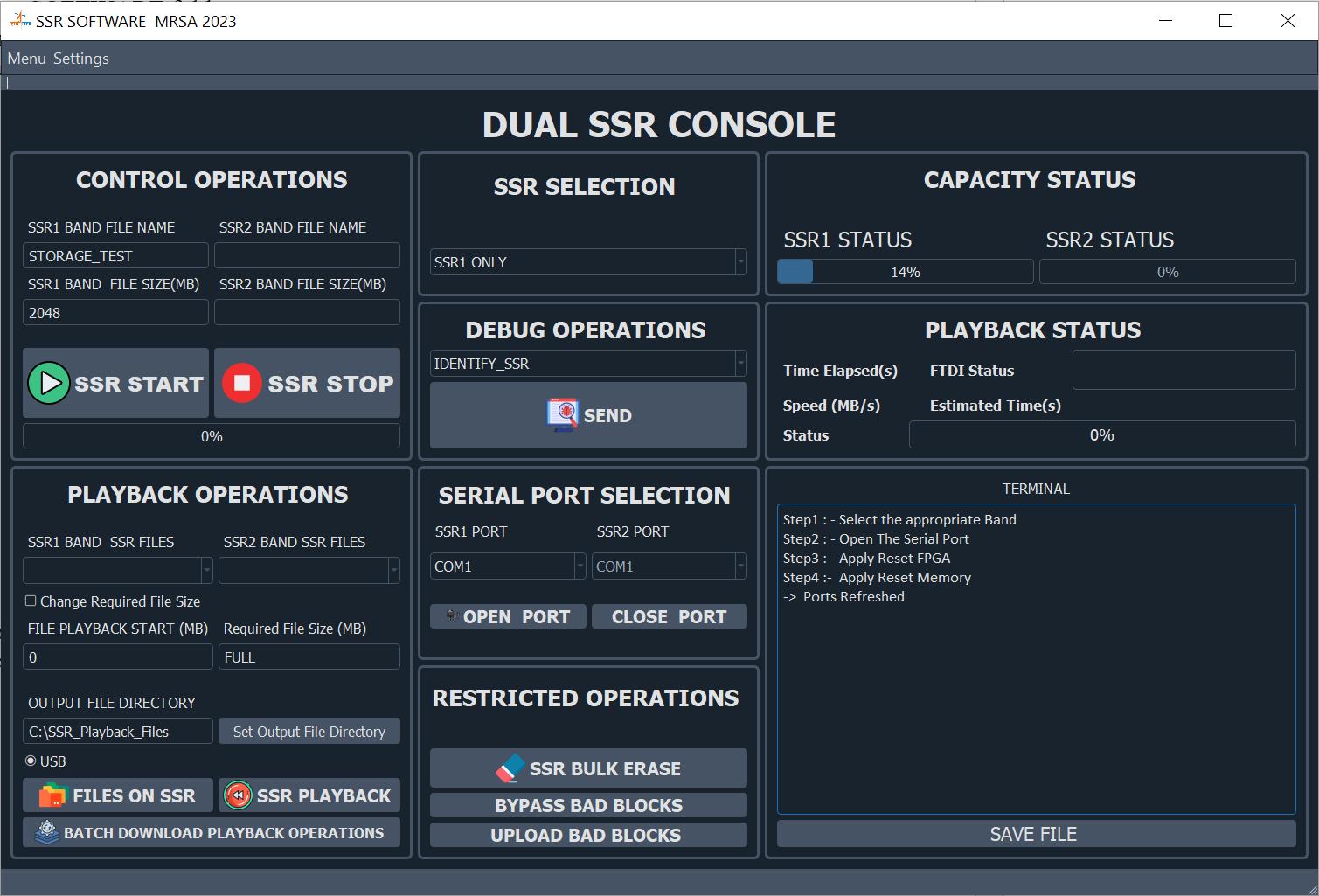
Solid State Recorder for SAR Missions
Overview
Engineered core firmware for Synthetic Aperture Radar data storage subsystem at ISRO, enabling
high-speed reliable data acquisition critical for earth observation payloads.
Technologies Used
Embedded SystemsFirmwareC/C++SARISRO
Gaganyaan Cabin Display System
Overview
Contributed to ISRO's human spaceflight mission by developing embedded software for cabin display
system, a key safety-critical HMI using OpenGL-ES and Petalinux.
Technologies Used
OpenGL-ESEmbedded LinuxHMIPetalinuxISRO
Detecting Food Item and Quantity
Overview
Architected computer vision system for Samsung IoT edge device deploying YOLOv4, R-CNN, BiT optimized
with TensorRT achieving 96% accuracy in real-time food identification with <100ms latency.
As part of the Aviators International Team of VIT, I contributed to the design and development of a Regular Class Aircraft for the prestigious SAE INDIA Aero Design Competition. This project challenged us to create an aircraft capable of meeting strict performance requirements while maintaining stability and safety throughout its flight envelope.
Our team successfully engineered a parasol wing configuration aircraft optimized for maximum lift generation, constructed from lightweight yet robust materials including plywood and aluminum, enhanced through additive manufacturing techniques. The aircraft demonstrated exceptional performance characteristics including stable flight, precise control, and efficient power management.
Design Objectives
The competition requirements demanded strict adherence to several critical performance parameters:
Takeoff Performance: Complete takeoff sequence within 100 feet of runway
Flight Stability: Achieve and maintain stable flight within 400 feet altitude
Maneuverability: Demonstrate precise turning capability with controlled banking
Landing Safety: Execute safe landing procedures with minimal ground roll
Technical Specifications
Wing Configuration
Design Type: Parasol wing configuration for optimal lift-to-drag ratio
Aerodynamic Optimization: High-lift airfoil selection for low-speed performance
Wing Placement: Elevated mounting above fuselage for improved ground clearance and stability
Structural Integration: Efficient strut-braced design minimizing weight while maximizing strength
Materials & Construction
Primary Structure: Plywood for main structural components offering excellent strength-to-weight ratio
Reinforcement Elements: Aluminum components at critical stress points and connection interfaces
Advanced Manufacturing: Additive manufacturing (3D printing) for complex geometries and custom fittings
Surface Finish: Lightweight covering material for aerodynamic smoothness
Power System
Battery Configuration: Lithium Polymer (Li-Po) battery pack for high energy density
Propulsion: Single electric motor with optimized propeller selection
Flight Endurance: Approximately 14 minutes of continuous flight operation
Thrust Performance: Motor and propeller combination providing sufficient thrust for all competition requirements
Power Management: Electronic speed controller (ESC) for efficient motor control and battery protection
Key Features
Parasol Wing Advantage: Provides superior visibility from cockpit and improved stability compared to low-wing designs
Lightweight Construction: Optimized material selection achieving minimum weight without compromising structural integrity
Electric Propulsion: Clean, quiet operation with excellent throttle response and controllability
Modular Design: Easy assembly and disassembly for transport and maintenance
Competition Ready: Designed to meet all SAE INDIA Aero Design Competition specifications
Performance Achievements
Successfully met takeoff distance requirement of 100 feet
Achieved stable flight within 400 feet altitude envelope
Demonstrated precise turning and maneuvering capabilities
Aerospace Engineering Fundamentals: Practical application of aerodynamic principles, structural mechanics, and flight dynamics
Design Process: Complete aircraft design lifecycle from conceptual design through detailed engineering to flight testing
Manufacturing Techniques: Hands-on experience with traditional woodworking, metalworking, and modern additive manufacturing
System Integration: Coordinating multiple subsystems (structure, propulsion, control surfaces) into cohesive aircraft design
Competition Experience: Working under strict requirements, timelines, and performance specifications
Team Dynamics: Collaborating with multidisciplinary team members to achieve common goals
Bank Cheque Processing System
Overview
Built automated bank cheque processing system using OCR and image processing techniques for efficient
cheque verification and data extraction.
Technologies Used
OCRImage ProcessingOpenCVPython
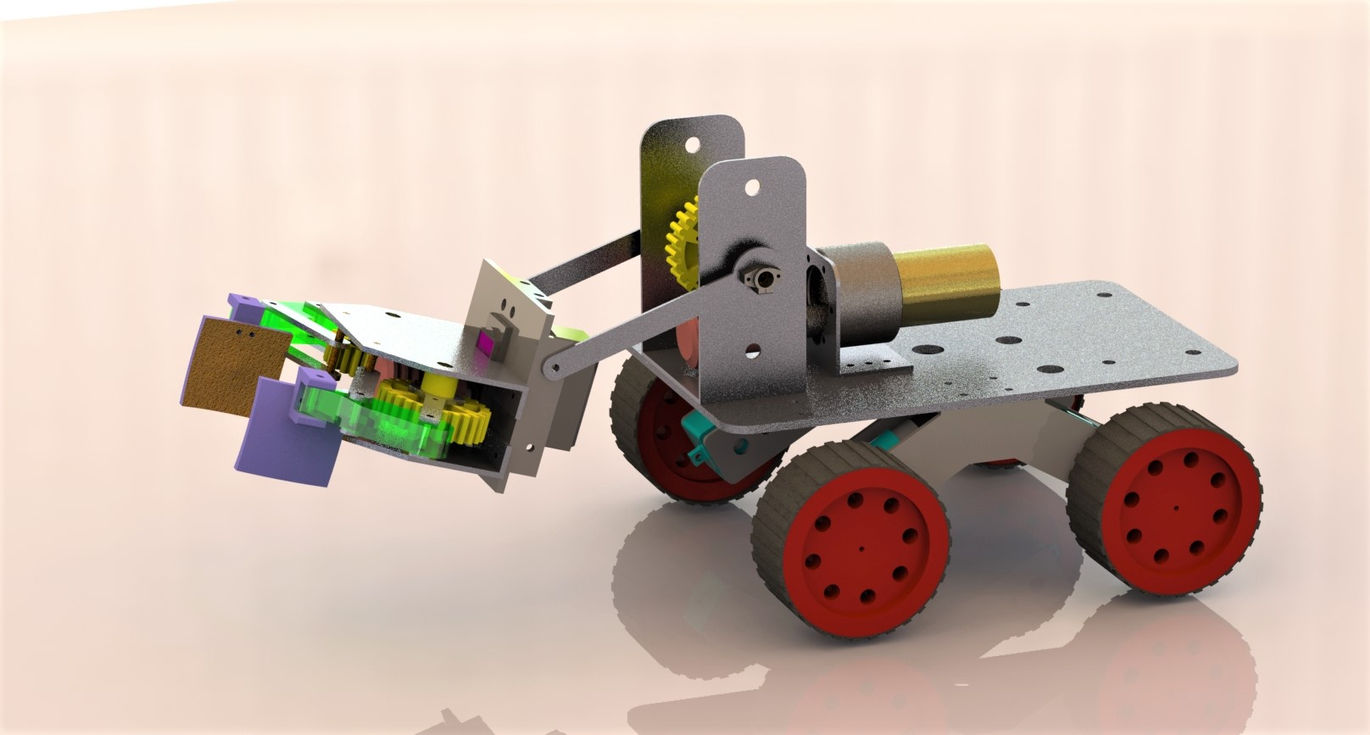
Cozmo Clench
Competition Details
Event: Cozmo Clench - Techfest, IIT Bombay
Year: 2022
Team: VIT Robotics Team
Overview
Developed an Arduino-based manually controlled rover robot for the Cozmo Clench robotics competition at Techfest, IIT Bombay. The robot was designed to navigate an arena, grip and manipulate blocks, and place them in designated target zones while overcoming various obstacles and challenges.
The competition challenged teams to design and build a manually controlled robot capable of navigating a 3000mm x 2500mm arena, gripping and lifting colored blocks, placing blocks in specific target zones, and operating within strict size and power constraints.
Key Features
Robot Design
Compact Dimensions: Robot designed within 300mm x 200mm x 300mm size constraints
Gripper Mechanism: Custom-designed claw mechanism for secure block manipulation
Sturdy Chassis: Robust frame construction for stability during block transport
Omnidirectional Movement: Four-wheel drive system for precise maneuvering
Control System
Arduino-based Control: Microcontroller-based architecture for motor control and sensor integration
Wireless Operation: Remote control system for manual robot operation
Power Management: Efficient 24V onboard power supply system
Motor Controllers: PWM-based motor drivers for smooth speed control
Mechanical Components
Gripper Assembly: Servo-controlled claw with adjustable grip strength
Drive Train: DC geared motors providing adequate torque for block manipulation
Structural Materials: Combination of metal and 3D-printed components
Sensor Integration: IR/ultrasonic sensors for obstacle detection
Technical Specifications
Maximum Dimensions: 300mm x 200mm x 300mm
Power Supply: 24V DC onboard battery system
Control: Manual wireless control with Arduino-based receiver
Gripper: Servo-controlled claw mechanism
Sensors: IR/Ultrasonic for obstacle detection
Motors: 4x DC geared motors for drive, 1-2 servos for gripper
Challenges and Solutions
Precise Block Gripping
Challenge: Achieving consistent and reliable grip on blocks of varying sizes
Solution: Designed adaptive gripper with rubber padding and adjustable servo angles for optimal grip force
Stability During Block Transport
Challenge: Robot tipping when lifting blocks due to center of gravity shift
Solution: Implemented low center of gravity design with counterweight and wide wheelbase for enhanced stability
Accurate Zone Placement
Challenge: Positioning blocks precisely in target zones under time pressure
Solution: Developed intuitive control mapping and practiced maneuvering patterns for efficient placement
Power Efficiency
Challenge: Battery drain during extended competition runs
Solution: Optimized power consumption through efficient motor selection and smart power management code
Competition Performance
Successfully completed block manipulation tasks
Demonstrated reliable gripper operation
Achieved consistent navigation and obstacle avoidance
Robotics Design: End-to-end robot development from concept to competition
Embedded Systems: Arduino programming and hardware interfacing
Mechanical Engineering: CAD design, 3D printing, and mechanism development
Control Systems: Manual control interface and motor control algorithms
Team Collaboration: Working with cross-functional team on tight deadlines
Problem Solving: Rapid prototyping and iterative design improvements
Competition Experience: Performing under pressure in competitive environment
Home Automation Using Augmented Reality
Overview
Developed AR-based home automation system enabling intuitive control of IoT devices through augmented
reality interface for seamless smart home management.
Technologies Used
Augmented RealityIoTUnityC#
Weather Prediction Using Extended Kalman Filter
Overview
Implemented Extended Kalman Filter for accurate weather prediction and state estimation from noisy
sensor data with improved forecasting accuracy.
Technologies Used
Kalman FilterState EstimationPythonMATLAB
University of Illinois Urbana-Champaign
Masters in Autonomy and Robotics
August 2025 - Present
Program Overview
Pursuing a Master's degree in Autonomy and Robotics at one of the world's leading engineering
institutions. The program focuses on advanced robotics systems, autonomous navigation, computer
vision, and safe AI deployment in real-world environments.
Academic Performance
4.0
Current GPA
Maintaining perfect academic standing while engaging in cutting-edge research and coursework.
Relevant Coursework
Computer Vision
Principle of Safe Autonomy
Humanoid Robotics
Mobile Robotics
Request Academic Transcripts
For official academic transcripts and records, please send a request via email.
Bachelor of Technology in Electronics and Communication Engineering
September 2020 - May 2024
Program Overview
Completed a comprehensive undergraduate program in Electronics and Communication Engineering, with a
strong focus on embedded systems, control systems, and machine learning applications. Gained
hands-on experience through multiple internships at leading organizations including ISRO and Samsung
R&D.
Academic Performance
3.8
Final GPA
Graduated with distinction, demonstrating excellence across core engineering and advanced
elective courses.
Relevant Coursework
Analog and Digital Electronics
Communication Systems
Control Systems
Algorithms
Machine Learning
Request Academic Transcripts
For official academic transcripts and records from VIT, please send a request via email.